Казахстанские ученые разработали манипулятор для 3D-принтера
Проект направлен на повышение эффективности систем 3D-печати, работающих на базе автобетононасоса.
Ученые Satbayev University разработали новую технологию — манипулятор, позволяющий повысить точность 3D-принтера, предназначенного для строительной отрасли. Решение обеспечивает высокоточное позиционирование печатающей головки и предотвращает отклонения, возникающие в процессе послойной укладки бетона. Данная технология упрощает внедрение и применение 3D-печати в строительстве на промышленном уровне.
В настоящее время в строительных 3D-принтерах для позиционирования печатающей головки преимущественно используются портальные, серийные или кабельные роботизированные системы. Однако такие решения не в полной мере адаптированы к сложным условиям строительной площадки, включая пыль, вибрации и температурные колебания, а также отличаются высокой сложностью калибровки.
В целях решения данной проблемы партнеры проекта — исследователи Дрезденского технического университета (Германия) — предложили использовать в качестве альтернативы автобетононасос. Однако его открытая кинематическая структура приводит к возникновению паразитных отклонений в процессе печати, что негативно влияет на точность возводимых конструкций.
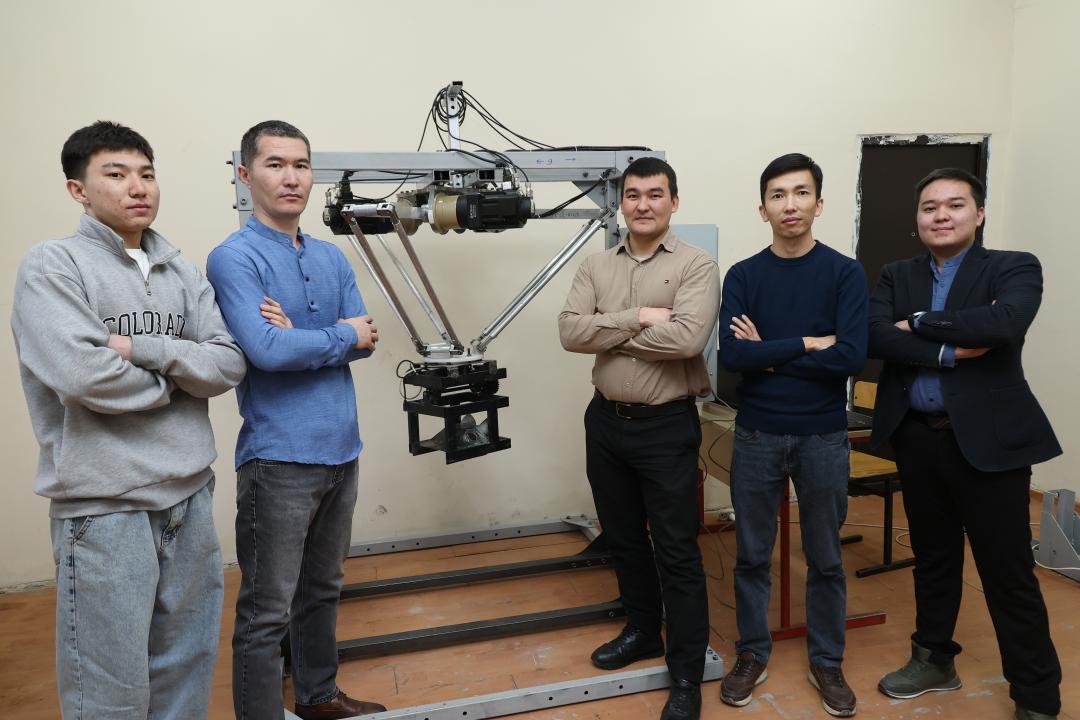
Для устранения указанных недостатков ученые Satbayev University разработали специальный компенсационный манипулятор, а также печатающее сопло для работы с бетоном. В ходе исследования был проведен комплексный анализ серийных, параллельных и гибридных манипуляторов. По результатам сравнительного анализа наиболее эффективным решением выбран параллельный манипулятор дельта-типа.
В рамках проекта выполнены необходимые инженерные расчеты и разработана полноценная 3D-модель устройства. Затем был изготовлен прототип в масштабе 1:1, который прошел экспериментальные испытания. В ходе тестирования манипулятор проверялся с нагрузкой 46 кг, что подтвердило его функциональные возможности и грузоподъемность. В результате была доказана работоспособность устройства и его способность обеспечивать точное позиционирование печатающей головки.
Как отметил научный руководитель проекта, PhD, ассоциированный профессор Азамат Мустафа, предложенное решение позволяет эффективно интегрировать существующую строительную технику с новыми технологиями: «Разработанный нами манипулятор повышает точность позиционирования печатающей головки и устраняет паразитные отклонения. Это открывает возможности для широкого промышленного применения 3D-печати в строительстве».
Научная новизна исследования заключается в адаптации существующего автобетононасоса под задачи строительного 3D-принтера за счет минимальных конструктивных изменений. Такой подход позволяет сократить необходимость приобретения дорогостоящих роботизированных систем и эффективно использовать уже имеющуюся на рынке технику. В результате снижается общая стоимость 3D-принтеров и создаются условия для более широкого внедрения технологии.
Проект реализуется в рамках программы грантового финансирования на 2023–2025 годы Комитета науки Министерства науки и высшего образования РК.
Напомним — 30 октября 2026 г. в Алматы пройдет конференция PROFIT Education Day, посвященная информационным технологиям в сфере образования.